













내가 지난 1-2개 십년 동안 컴퓨터 비전 분야를 혁신시킨 经典 卷积神经网络에 관한 시리즈를 계속하며, 다음으로 PyTorch를 사용하여 처음부터 매우 깊은 卷积神经网络인 VGG를 구축하겠습니다. 시리즈의 이전 기사를 내 프로필에서 확인할 수 있으며, 주로 LeNet5와 AlexNet입니다.
지금까지와 마찬가지로 VGG의 아키텍처와 그 배경을 살펴볼 것이며, 당시 결과가 어떠한지 알아보겠습니다. 그 다음에 우리의 데이터셋인 CIFAR100을 살펴보고, 메모리 효율적인 코드를 사용하여 프로그램에 로드합니다. 그런 다음 PyTorch를 사용하여 VGG16(숫자는 레이어 수를 가리킵니다, 기본적으로 VGG16와 VGG19 두 버전이 있음)를 처음부터 구현한 후, 우리의 데이터셋으로 학습시키고 테스트 세트에서 평가하여 알지 못한 데이터에서의 성능을 볼 것입니다
VGG
AlexNet의 작업에 기반하여 深さ를 주목하는 Convolutional Neural Networks (CNNs)의 또 다른 중요한 측면에 집중하는 VGG이 시 Monica Simonyan와 Andrew Zisserman이 발전시켰습니다. 一般的으로 16개의 卷積 层层로 구성되나, 19개의 层层로 확장할 수 있으며 (따라서 VGG-16과 VGG-19의 두 가지 버전이 있다) 모두 3×3 필터를 갖추고 있습니다. 공식 논문에서 네트워크에 대해 더 많은 정보를 읽으실 수 있습니다. 여기

VGG16 아키텍처에 대한 자세한 내용을 확인할 수 있습니다. 소스
데이터 로딩
데이터셋
대부분의 머신러닝 프로젝트에서 가장 중요한 것之一는 모델을 빌드하기 전에 데이터셋을 불러오고, 분석하며 사전 처리하는 것입니다. 이篇文章에서 우리는 CIFAR-100 데이터셋을 사용하게 됩니다. 이 데이터셋은 CIFAR-10와 비슷하지만, 600개의 이미지를 갖는 100개의 클래스가 있습니다. 각 클래스당 500개의 훈련 이미지와 100개의 테스트 이미지가 있습니다. CIFAR-100의 100개 클래스는 20개의 초 클래스로 그룹화되어 있습니다. 각 이미지는 “fine” 레이블(이미지가属하는 클래스)와 “coarse” 레이블(이미지가属하는 초 클래스)로 구성되어 있습니다. 우리는 여기서 “fine” 레이블을 사용하게 될 것입니다. CIFAR-100의 클래스 목록은 다음과 같습니다:
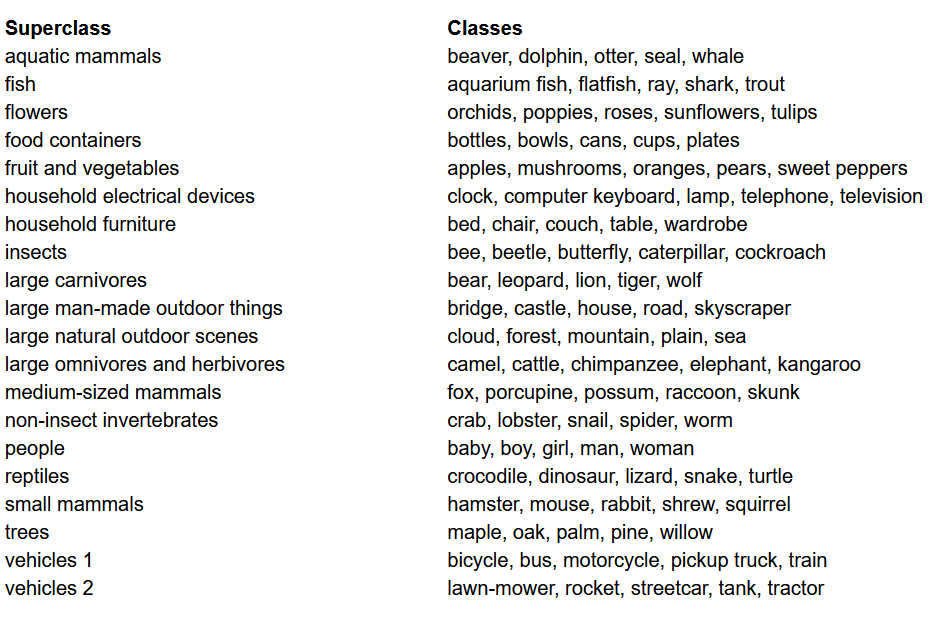
CIFAR-100 데이터셋의 클래스 목록
라이브러리 가져오기
우리는 주로 torch (모델 구축 및 훈련에 사용), torchvision (데이터 불러오기/처리, 컴퓨터 비전 데이터셋과 그 데이터셋 처리 방법을 포함), numpy (수학적 조작)를 사용하게 될 것입니다. 또한 device 변수를 정의하여 프로그램이 가능하다면 GPU를 사용할 수 있도록 하겠습니다.
데이터 로딩
torchvision은 컴퓨터 비전 데이터셋 많은 것을 쉽게 접근하는 라이브러리이며, 이들 데이터셋을 간단하고 直观적으로 전처리하는 방법을 제공합니다.
- 우리는 인자에 따라 훈련/검증 데이터나 시험 데이터를 돌려주는
data_loader함수를 정의합니다. - 우리는 dataset의 각 채널(빨강, 녹색, 蓝色字体)의 평균과 표준 편차를 담는 변수
normalize를 정의합니다. 이것은 수동으로 계산할 수 있으며, 网上에도 사용 가능합니다. 이것은 데이터를 이진화하고, 툴팁으로 변환하고 그 后来에 일정화하는transform변수에 사용됩니다. -
test인자가 참이면, 데이터 로더를 사용하여 시험 분할을 넣고 돌려줍니다.(아래에서 설명합니다) -
test인자가 거짓이면(기본적인 behavior도 마찬가지), 훈련 분할을 넣고 무작위하게 훈련 및 검증 세트(0.9:0.1)로 나누어줍니다. - 결국, 데이터 로더를 사용합니다. CIFAR100과 같은 작은 dataset에 대해서는 성능에 영향을 미치지 않지만, 大型 dataset에 대해서는 실제로 성능을 obstruction할 수 있으며, 일반적으로 좋은 惯行이 되어 있습니다. 데이터 로더는 batch로 데이터를 이룰 수 있는 것을 허용합니다. 이를 통해 시작할 때 Ram에 모두 들어가지 않고, 이 iterating하는 것과 동시에 로드합니다.
VGG16 scratch 로 만들기
Scratch로 모델을 만들기 위해서는 우선 torch 中 model definitions의 작동方式을 이해해야 합니다. 이를 위해 사용할 Layers의 종류를 이해하는 것이 중요합니다.:
- Custom model은
nn.Moduleクラス를 상속받아야만 기본적인 機能을 가지고 있도록 모델을 训练 할 수 있습니다. - 두 가지 주요한 것을 해야 합니다. 첫째,
__init__함수 안에 모델의 다양한 Layer를 정의하고, 이들 Layer가 입력에 대해 실행되는 순서를forward함수 안에 정의합니다.
이제 여기에서 사용하는 다양한 Layer 종류를 정의하겠습니다:
nn.Conv2d: 이것은 입력과 출력 チャンネル의 수를 인자로 받고, 필터의 크기를 갖는 卷積 层层입니다. 이것이 必要하면 스트라이드나 패딩을 받을 수 있습니다.nn.BatchNorm2d: 이것은 卷積 层层의 출력에 batch normalization을 적용합니다.nn.ReLU: 이것은 네트워크 내에서 다양한 출력에 적용되는 활성화 함수입니다.nn.MaxPool2d: 지정한 kernel size로 output에 max pooling을 적용합니다.nn.Dropout: 주어진 확률로 output에 dropout을 적용합니다.nn.Linear: 기본적으로 전чно 연결된 层次입니다.nn.Sequential: 层次의 유형이 아닌 것이지만, 동일한 단계의 여러 操作을 결합하는 것에 도움이 됩니다.
이러한 지식을 사용하여, 우리는 지문에 나오는 구조를 사용하여 VGG16 모델을 만들 수 있습니다.:
VGG16 from Scratch
Hyperparameters
모든 기계 或者 깊은 leaning 프로젝트의 중요한 부분은 hyper-parameters를 최적화하는 것입니다. 여기서는 이러한 값을 다양하게 시험하지 않고 이전에 정의해야 합니다. 이에 epoch의 수, 배치 사이즈, 학습률, 손실 関数 및 오timizer를 정의하는 것이 포함됩니다.
hyper-parameters를 설정합니다.
Training
우리는 이제 모델을 훈련시키기 시작합니다. 우선 torch에서 모델을 어떻게 훈련시키는지 살펴보고 코드를 확인하겠습니다:
- 각 epoch마다 우리는
train_loader내의 이미지와 레이블을 순회하며, 가능한 경우 GPU로 이들을 옮깁니다. 이 과정은 자동으로 이루어집니다 - 우리는 모델을 사용하여 레이블을 예측하고(
model(images)) 예측 결과와 실제 레이블간의 손실을 손실 함수(criterion(outputs, labels))를 사용하여 계산합니다 - 그리고 해당 손실을 사용하여 역전파(
loss.backward)를 수행하고 가중치를 업데이트합니다(optimizer.step()). 하지만 각 업데이트 전에 기울기를 제로로 설정해야 합니다. 이는optimizer.zero_grad()를 사용하여 수행됩니다 - 또한 각 epoch의 끝에 우리는 검증 세트를 사용하여 모델의 정확도를 계산합니다. 이 경우에는 기울기가 필요 없으므로
with torch.no_grad()를 사용하여 더 빠른 평가를 수행합니다
이제 이 모든 것을 다음 코드에 통합합니다:
훈련
위 코드의 출력은 다음과 같이, 모델이 실제로 학습하고 있음을 보여주며, 각 epoch마다 손실이 줄어들고 있음을 보입니다:
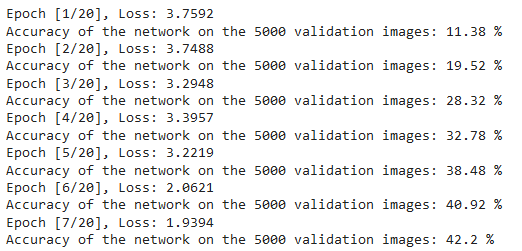
훈련 손실
테스트
테스트 목적으로는 Validation과 동일한 코드를 test_loader를 사용하여 실행합니다.:
테스트
위의 코드를 사용하고 모델을 20 epochs 동안 训练 한 후, Teset 셋에 대한 정확도가 75%를 달성했습니다.
결론
이제 文章에서 실제로 하는 것에 대해 결론을 드립니다:
- 우선 VGG-16 모델의 아키텍처와 다양한 层次을 이해하였습니다.
- 次に,
torchvision를 사용하여 CIFAR100 데이터셋을 로드하고 전처리하였습니다. - 그 다음,
PyTorch를 사용하여 기반이 되는 VGG-16 모델을 만들고torch에 있는 다양한 层次을 이해하였습니다. - 마지막으로, CIFAR100 데이터셋을 통해 모델을 训练하고 테스트하였고, 모델은 75%의 정확도로 테스트 데이터셋에 대해 좋게 동작하였습니다.
将来の작업
이 文章을 사용하면 좋은 소개와 现场 학습을 얻을 수 있지만, 이를 확장하고 다른 것을 할 수 있는지 여부에 대해 더 많은 것을 배울 수 있습니다.
- 다른 데이터셋을 시도할 수 있습니다. 하나의 데이터셋은 CIFAR10이나 ImageNet 데이터셋의 미분 일부입니다.
- 다양한 하이퍼パarameter를 시도하여 모델에 가장 좋은 조합을 확인할 수 있습니다.
- 결국, 이 데이터셋에 层次를 추가하거나 제거하여 그들이 모델의 능력에 미칠 영향을 확인할 수 있습니다. 더 나은 것은, 이 모델의 VGG-19 버전을 빌드하는 것입니다.
Source:
https://www.digitalocean.com/community/tutorials/vgg-from-scratch-pytorch