













À medida que a inteligência artificial fica mais avançada, os robôs são cada vez mais usados para libertar os humanos dos riscos de inspecionar locais perigosos ou da rotina da vigilância visual. Para fornecer um certo grau de decisão autônoma, o robô frequentemente possui câmeras conectadas a um computador Linux embarcado, como um NVIDIA Jetson ou um computador de placa única (SBC) x86.
Se a aplicação se beneficia de vídeo ao vivo em 360 graus, existem duas abordagens. A primeira, mais difícil, é usar múltiplas câmeras e costurar o vídeo no computador ou processar cada feed de vídeo separadamente. O número de câmeras usadas depende do campo de visão de cada uma. Se o robô usar duas lentes olho de peixe que podem mostrar mais de 180 graus, apenas duas câmeras são necessárias. É comum usar três ou quatro câmeras.
Uma abordagem mais simples é usar uma câmera 360° para consumidores. Na comunidade de desenvolvedores livre e independente theta360.guide, um dos tópicos mais populares discutidos pelos desenvolvedores é como adicionar visão 360° ao protótipo de seu robô e alimentar o vídeo no OpenCV.
Embora existam diferentes maneiras de transferir o vídeo da câmera de 360° para o computador Linux, o método mais popular é usar um cabo USB. WiFi e Ethernet não são tão populares. Os modelos RICOH THETA V, X e Z1 podem aparecer como uma webcam USB para o computador Linux. No entanto, é necessário um pouco de trabalho no Linux. Computadores MacOS podem usar a câmera RICOH THETA diretamente. Para o Windows, a RICOH fornece um driver. Para o Linux, a RICOH fornece uma versão modificada do libuvc no GitHub chamada libuvc-theta.
Para expor a câmera como um dispositivo de vídeo para o OpenCV, a RICOH fornece um programa de exemplo, libuvc-theta-sample. Isso pode ser usado com v4l2loopback para disponibilizar um dispositivo /dev/video* para o OpenCV.
Para testar a conexão da câmera com o computador Linux, primeiro conecte um cabo USB da câmera ao computador Linux e siga estas etapas:
git clone https://github.com/ricohapi/libuvc-theta.git
sudo apt install libjpeg-dev
cd libuvc-theta
mkdir build
cd build
cmake ..
make
sudo make install
cd ../..
git clone https://github.com/ricohapi/libuvc-theta-sample.git
cd libuvc-theta-sample/gst
make
# A THETA deve estar conectada ao seu computador e em
# modo de transmissão ao vivo
./gst_viewer
Câmera de vídeo de 360° exibida com gstreamer
Se a compilação falhar, talvez seja necessário instalar bibliotecas adicionais do gstreamer. Isso instalará todas as bibliotecas necessárias.
sudo apt-get install \
libgstreamer1.0-0 \
gstreamer1.0-plugins-base \
gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad \
gstreamer1.0-plugins-ugly \
gstreamer1.0-libav \
gstreamer1.0-doc \
gstreamer1.0-tools \
gstreamer1.0-x \
gstreamer1.0-alsa \
gstreamer1.0-gl \
gstreamer1.0-gtk3 \
gstreamer1.0-qt5 \
gstreamer1.0-pulseaudio \
libgstreamer-plugins-base1.0-devAlém disso, um Raspberry Pi 4 não funcionará devido à falta de suporte de decodificação de hardware 4K H.264.
Configurando /dev/video*
Para tornar o dispositivo libuvc disponível como um dispositivo de vídeo, podemos usar o v4l2loopback. O aplicativo libuvc-theta-sample usará o gstreamer para enviar o vídeo para o v4l2.
Se você tiver apenas uma câmera de vídeo em seu computador, então você deve modificar esta linha antes de executar a compilação. A linha abaixo é para um computador com a RICOH THETA conectada a ele como a única webcam:
"v4l2sink device=/dev/video0 sync=false";Acesso a partir do OpenCV
Para testar se a câmera pode ser usada a partir do OpenCV, vamos começar com um redimensionamento simples de quadro.
import cv2
cap = cv2.VideoCapture(0)
# Verifique se a webcam foi aberta corretamente
if not cap.isOpened():
raise IOError("Cannot open webcam")
while True:
ret, frame = cap.read()
frame = cv2.resize(frame, None, fx=0.25, fy=0.25, interpolation=cv2.INTER_AREA)
cv2.imshow('Input', frame)
c = cv2.waitKey(1)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()Latência da Câmera
A latência é um grande problema nas discussões da comunidade. A latência da câmera THETA é aproximadamente de 350ms. Isso é muito alto para muitas aplicações que exigem que o robô reaja rapidamente. Também é muito alto para telepresença se você estiver controlando um drone que está se movendo ao redor de obstáculos. A latência é devido à costura das duas lentes na câmera. A costura não pode ser desativada na transmissão de vídeo.
Alternativa ao v4l2loopback
Como o v4l2loopback adiciona complexidade e sobrecarga, o pacote gstthetauvc pode ser usado para acessar a câmera diretamente do gstreamer.
Aqui está o mesmo teste usando gstthetauvc.
import cv2
# pipeline abaixo funcionou
# cap = cv2.VideoCapture("thetauvcsrc \
# ! decodebin \
# ! autovideoconvert \
# ! video/x-raw,format=BGRx \
# ! queue ! videoconvert \
# ! video/x-raw,format=BGR ! queue ! appsink")
# sugestão de pipeline graças a nickel110
# tentativa de forçar aceleração de hardware
# testado com NVIDIA 510.73 com a antiga GTX 950 no Ubuntu 22.04
cap = cv2.VideoCapture("thetauvcsrc \
! queue \
! h264parse \
! nvdec \
! gldownload \
! queue \
! videoconvert n-threads=0 \
! video/x-raw,format=BGR \
! queue \
! appsink")
if not cap.isOpened():
raise IOError('Cannot open RICOH THETA')
while True:
ret, frame = cap.read()
frame = cv2.resize(frame, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
cv2.imshow('frame', frame)
c = cv2.waitKey(1)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()Exemplos de Feed de Vídeo 360 Ao Vivo
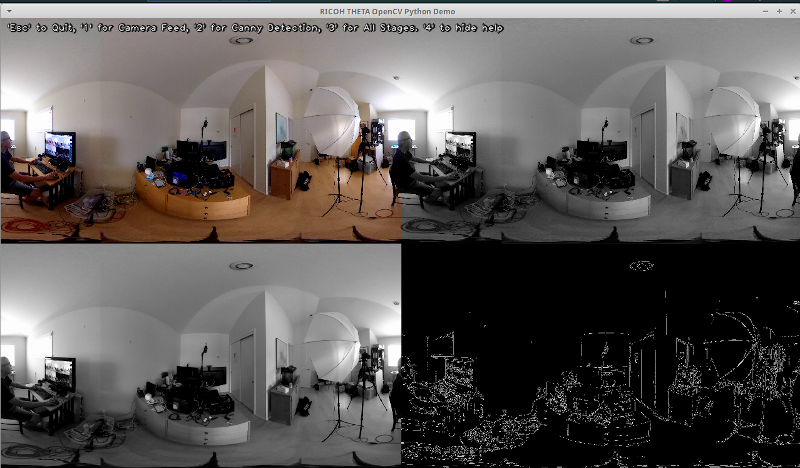
Aqui estão alguns exemplos de uso do OpenCV para transformação de cor e detecção de bordas.
# Converter para escala de cinza
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Desfoque a imagem para melhor detecção de bordas
img_blur = cv2.GaussianBlur(img_gray, (3,3), 0)
# Detecção de Bordas Canny
edges = cv2.Canny(image=img_blur, threshold1=100, threshold2=200) # Detecção de Bordas Canny
# Mostrar Imagem de Detecção de Bordas Canny
cv2.imshow('Canny Edge Detection', edges) Deteção de pessoa e monitor ao vivo.
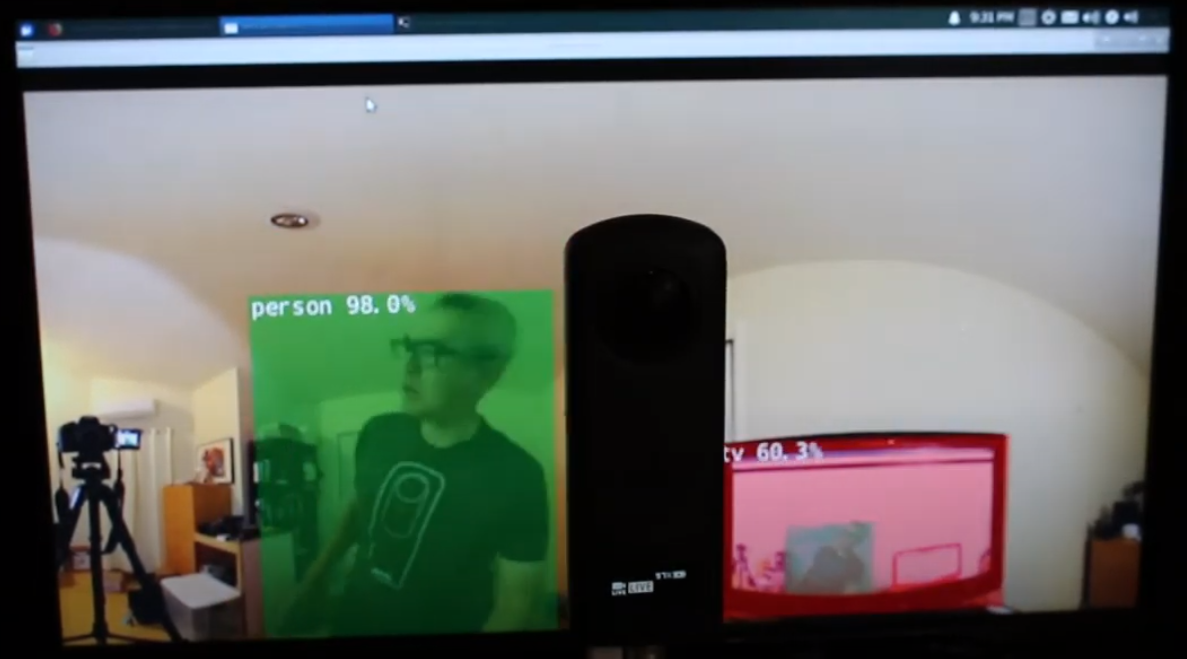
A câmera possui duas lentes. O lado oposto ao botão do obturador é a lente traseira e será colocada no centro da cena. A detecção de objetos é mais precisa quando o objeto está centrado na vista equiretangular.

Pessoa centrada na lente traseira
No entanto, a detecção funciona razoavelmente bem quando o humano está na borda da visão equiretangular, mesmo à noite. Você pode precisar treinar seu modelo em um banco de dados de imagens olho de peixe ou 360°.

Humano detectado na borda da visão equiretangular
Melhorando a Detecção
Agora que você tem a detecção básica funcionando em quadros equiretangulares de um feed de vídeo 360° ao vivo, você pode experimentar diferentes técnicas para melhorar a precisão. Um método é criar várias cenas achatadas a partir de cada quadro e, em seguida, detectar o objeto em cada cena. O vídeo Detecção de Objetos 360° (Yolo) no ROS2 rviz2 e KR260 do engenheiro misoji fornece uma boa demonstração dessa técnica. Também há uma versão do YOLO que foi modificada para uso com vídeo panorâmico. Consulte o artigo PV-YOLO: Um Modelo de Detecção de Objetos para Vídeo Panorâmico baseado no YOLOv4.
Conclusão
Usando uma câmera 360° de prateleira, é possível facilmente fazer com que o vídeo de 360° apareça como uma webcam USB para software como o OpenCV. Com o vídeo de 360° acessível como um dispositivo de vídeo ou acessado através do gstreamer, o OpenCV padrão ou outro software de detecção pode ser usado nos quadros equiretangulares do vídeo ao vivo. Devido à distorção da imagem, o algoritmo de detecção de objetos não funcionará tão bem quanto em comparação com uma webcam não-360° padrão. No entanto, mesmo sem modificação, ainda é possível começar com alguma detecção.
Para realmente usar a detecção para mais do que um projeto educacional ou de pesquisa, será necessário investigar técnicas para melhorar o reconhecimento dos objetos na visualização equiretangular distorcida.
Source:
https://dzone.com/articles/opencv-integration-live-video-for-robotics